inch. In a 2,000-psi system, pressure acting against the blank side of the piston creates a force of 6,000 pounds (2,000 x 3). When the pressure is applied to the rod side of the piston, the 2,000 psi acts on 2 square inches (the cross-sectional area of the piston less the cross-sectional area of the rod) and creates a force of 4,000 pounds (2,000 x 2). For this reason, this type of cylinder is normally installed in such a manner that the blank side of the piston carries the greater load; that is, the cylinder carries the greater load during the piston rod extension stroke.
A four-way directional control valve is normally used to control the operation of this type of cylinder. The valve can be positioned to direct fluid under pressure to either end of the cylinder and allow the displaced fluid to flow from the opposite end of the cylinder through the control valve to return/exhaust.
Motors
A fluid power motor is a device that converts fluid power to rotary motion and force. Basically, the function of a motor is just the opposite as that of a pump; however, the design and operation of fluid power motors are very similar to pumps. In fact, some hydraulic pumps can be used as motors with little or no modifications; therefore, your having a thorough knowledge of the pumps will be extremely helpful to you in understanding the operation of fluid power motors.
Motors serve many applications in fluid power systems. In hydraulic power drives, pumps and motors are combined with suitable lines and valves to form hydraulic systems. The pump, commonly referred to as the A-end, is driven by some outside source, such as a diesel or gasoline engine. The pump delivers fluid to the motor. The motor, referred to as the B-end, is actuated by this flow, and, through mechanical linkage, conveys rotary motion and force to the work.
Fluid motors are usually classified according to the type of internal element, which is directly actuated by the flow. The most common types of elements are the gear, vane, and piston. All three of these types are adaptable for hydraulic systems, while only the vane type is used in pneumatic systems.
GEAR TYPE. - The gears of the gear-type motor are of the external type and may be of the spur, helical, or herringbone design. These designs are the same as those used in gear pumps.
The operation of a gear-type motor is illustrated in figure 10-14. Both gears are driven gears; however, only one is connected to the output shaft. As fluid under pressure enters chamber A, it takes the path of least resistance and flows around the inside surface of the housing, forcing the gears to rotate as indicated. The flow continues through the outlet port to return. This rotary motion of the gears is conveyed through the attached shaft to the work unit.
Although the motor illustrated in figure 10-14 shows operation in only one direction, the gear-type motor is capable of providing rotary motion in either direction. The ports alternate as inlet and outlet, To reverse the direction of rotation, the fluid is directed through the port-labeled outlet, into chamber B. The flow through the motor rotates the gears in the opposite direction, thus actuating the work unit accordingly.
VANE TYPE. - A typical vane-type air motor is illustrated in figure 10-15, view A. This particular motor provides rotation in only one direction. The rotating element is a slotted rotor mounted on a drive shaft. Each slot of the rotor is fitted with a freely sliding rectangular vane. The rotor and vane are enclosed in the housing - the inner surface of which is offset with the drive shaft axis. When the rotor is in motion, the vanes tend to slide outward because of centrifugal force. The distance the vanes slide is limited by the shape of the rotor housing.
This motor operates on the principle of differential areas. When compressed air is directed into the inlet port, its pressure is exerted equally in all directions. Since area A is greater than area B, the rotor will turn counterclockwise. Each vane, in turn, assumes the No. 1 and No. 2 position and the rotor turns continuous y. The potential energy of the compressed air is thus
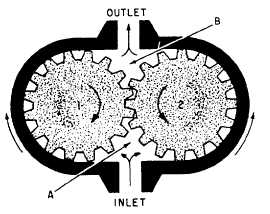
Figure 10-14.-Example of a gear-type of hydraulic motor.
Continue Reading