Home > Construction Training Manuals > Construction Mechanic Basic Volume 2 > Cross And Roller Universal Joint
two yokes (fig. 5-3). The two yokes are set at right angles to each other and their open ends are connected by the journal. This construction permits each yoke to pivot on the axis of the journal and also permits the transmission of rotary motion from one yoke to the other. As a result, the universal joint can transmit power from the engine through the shaft to the rear axle, even though the engine is mounted in the frame at a higher level than the rear axle, which is constantly moving up and down in relation to the engine.
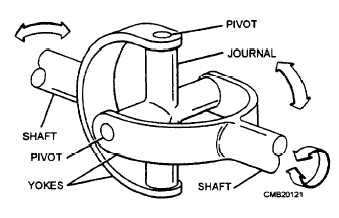
Figure 5-3. - Simple universal joint.
A peculiarity of the conventional universal joint is that it causes a driven shaft to rotate at a variable speed in respect to the driving shaft. There is a cyclic variation in the form of an acceleration and deceleration of speed (fig. 5-4). Two universal joints are placed in a drive shaft to eliminate the speed fluctuations of the shaft while the shaft is at an angle to the power source. The universal joints are placed at a 90-degree angle to each other and one counteracts the action of the other while in motion.
Three common types of automotive drive shaft universal joints are used on rear-wheel drive vehicles: cross and roller, ball and trunnion, and double-cardan (constant velocity) universal joints.
Cross and Roller Universal Joint
The cross and roller design is the most common type of drive shaft U-joint. It consists of four bearing caps, four needle roller bearings, a cross or journal, grease seals, and snap rings (fig. 5-5).
The bearing caps are held stationary in the drive shaft yokes. Roller bearings fit between the caps and the cross to reduce friction. The cross is free to rotate inside the caps and yokes. Snap rings usually fit into grooves cut in the caps or the yoke bores to secure the bearing caps and bearings. There are several other methods of securing the bearing caps in the yokes. These are bearing covers, U-bolts, and bearing caps.
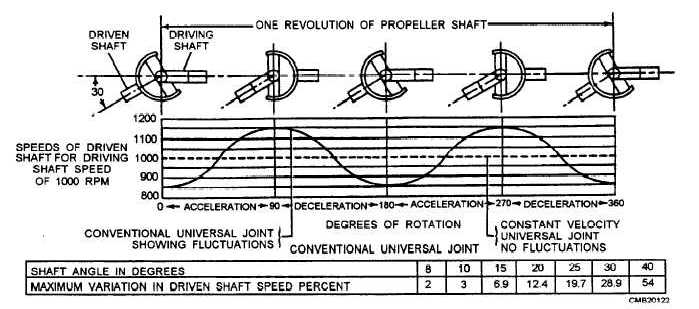
Figure 5-4. - Speed fluctuations caused by conventional universal joints.
Continue Reading